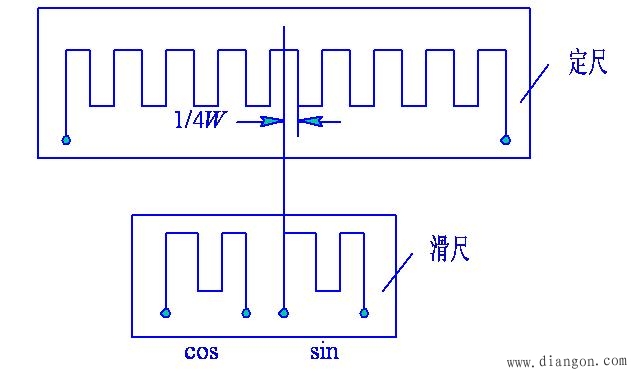
若绕组的节距为W,相对位移为l,则

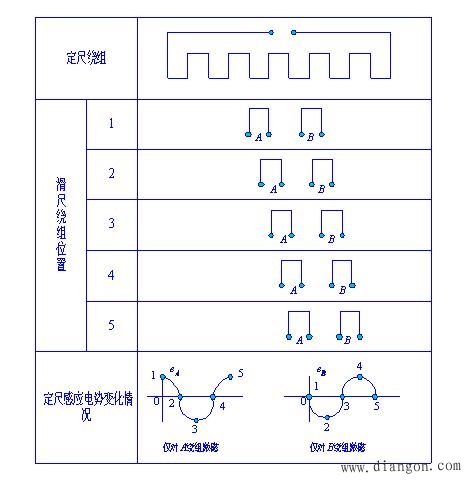
同样,当仅对正弦绕组B施加交流激磁电压
UB时,定尺绕组感应电势为
eB=-
KuB sinθ (4-13)
对滑尺上两个绕组同时加激磁电压,则定尺绕组上所感应的总电势为
e=
eA+
eB=
KuA
cos
θ-
KuBsinθ
=
KUmsin
ω
tcosω-
KUm
cos
ω
tsinω
=
KUmsin (
ω
t-
θ) (4-14)
从上式可以看出,感应同步器把滑尺相对定尺的位移l的变化转成感应电势相角θ的变化。因此,只要测得相角θ,就可以知道滑尺的相对位移l:

(
2
)鉴幅式
在滑尺的两个绕组上施加频率和相位均相同,但幅值不同的交流激磁电压
uA和
uB。
uA=
Umsinθ-1sinωt (4-16)
uB=
Umcosθ -1 sinωt (4-17)
式中:
θ1――指令位移角。
设此时滑尺绕组与定尺绕组的相对位移角为θ,则定尺绕组上的感应电势为
e=
KuA cosθ-
KuBsinθ=
KUm(sinθ -1 cosθ-cosθ-1sinθ)sinωt=
KUmsin (θ1-θ) sinωt (4-18)