
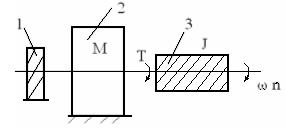
图1 电机驱动机械运动装置
1-制动器 2-电动机 3-负载
图1所示是带有制动装置的电机驱动机械运动装置,图中T为电机的驱动力矩(N・m),当加速时M为正值,减速时M为负值;J为负载和电机转子的转动惯量(kg・m2); n为轴的转速(r/min);根据动力学平衡原理知:
 (1)
(1)
若T为恒定时可求得
 (2)
(2)
当用转速n表示上式得
 (3)
(3)
 和
和 是初始转速
是初始转速
由式(3)即可求出加速或减速所需时间
 (4)
(4)
以上各式中T和J都是与时间无关的函数。但在实际问题中,例如起动时电机的输出力矩是变化的,机械手装置中转臂至回转轴的距离在回转时也是变化的,因而J也随之变化。若考虑力矩T与J是时间的函数,则
T = (t ) J =
(t ) J = ( t )
( t )
由 (2)得
积分后得

或
 (5)
(5)
全站搜索