
2024-02-27 02:32:11 | 人围观 | 评论:
1.创建结构体变量
GLOBAL SUB HMI_INIT()
GLOBAL gv_CurParamNum '当前配方号
gv_CurParamNum=0
GLOBAL gv_PageNum '页码
gv_PageNum=0
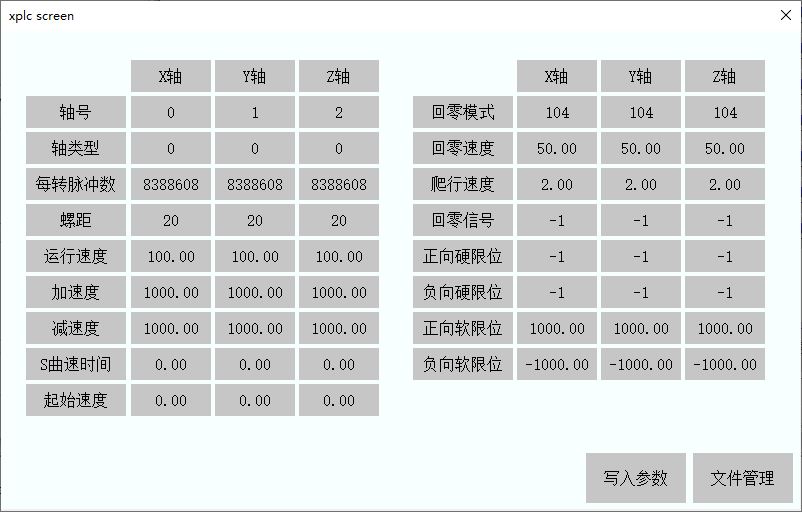
GLOBAL CONST gv_SysMaxAxis=3 '最大轴数
GLOBAL STRUCTURE AxisParam
'''轴参数
DIM No '轴号
DIM AxisAtype '轴类型
DIM AxisDpos '轴的当前位置
DIM OnePulses '轴电机一圈脉冲数
DIM AxisPitch '轴螺距
DIM AxisSpeed '轴的运动速度
DIM AxisAccel '轴的加速度
DIM AxisDecel '轴的减速度
DIM AxisSramp '轴的S曲线时间
DIM AxisLspeed '轴的起始速度
DIM FsLimit '轴正限位
DIM RsLimit '轴负限位
'''回零参数
DIM DatumMode '轴回零模式
DIM BackZeroSpeed '轴的回零速度
DIM AxisCreep '轴的回零第2段速度
DIM DatumIn '轴原点信号
DIM FwdIn '轴正限位信号
DIM RevIn '轴负限位信号
END STRUCTURE
GLOBAL STRUCTURE SysParam
DIM SysAxis(gv_SysMaxAxis) AS AxisParam '系统轴数
DIM FileName(50) '参数文件名
END STRUCTURE
GLOBAL gs_SysParam(50) AS SysParam '定义系统结构体变量
LOCAL lv_i
FOR lv_i=0 to gv_SysMaxAxis-1
'初始化轴参数变量
gs_SysParam(0).SysAxis(lv_i).No=lv_i
gs_SysParam(0).SysAxis(lv_i).AxisAtype=0 '轴类型
gs_SysParam(0).SysAxis(lv_i).OnePulses=8388608 '轴电机一圈脉冲数
gs_SysParam(0).SysAxis(lv_i).AxisPitch=20 '轴螺距
gs_SysParam(0).SysAxis(lv_i).AxisSpeed=100 '轴的运动速度
gs_SysParam(0).SysAxis(lv_i).AxisAccel=1000 '轴的加速度
gs_SysParam(0).SysAxis(lv_i).AxisDecel=1000 '轴的减速度
gs_SysParam(0).SysAxis(lv_i).AxisSramp=0 '轴的S曲线时间
gs_SysParam(0).SysAxis(lv_i).AxisLspeed=0 '轴的起始速度
'初始化回零参数变量
gs_SysParam(0).SysAxis(lv_i).DatumMode=104 '轴的回零模式
gs_SysParam(0).SysAxis(lv_i).BackZeroSpeed=50 '轴的回零速度
gs_SysParam(0).SysAxis(lv_i).AxisCreep=2 '轴的回零第2段速度
gs_SysParam(0).SysAxis(lv_i).DatumIn=-1 '轴的回零信号
gs_SysParam(0).SysAxis(lv_i).FwdIn=-1 '轴的正向硬限位信号
gs_SysParam(0).SysAxis(lv_i).RevIn=-1 '轴的负向硬限位信号
gs_SysParam(0).SysAxis(lv_i).FsLimit=1000 '轴正限位
gs_SysParam(0).SysAxis(lv_i).RsLimit=-1000 '轴负限位
'初始化参数文件
gs_SysParam(0).FileName="NONE" '初始化参数文件名
NEXT
FOR lv_i=0 to 49
gs_SysParam(lv_i)=gs_SysParam(0) '初始化其他配方参数
NEXT
ENDSUB
2.保存配置文件
GLOBAL SUB SaveCurParam()
LOCAL iflsflag
iflsflag=70214733
FLASH_WRITEDBL gv_CurParamNum,iflsflag,gs_SysParam(gv_CurParamNum)
?"下载成功"
ENDSUB
3.读取配置文件
GLOBAL SUB LoadCurParam()
LOCAL iflsflag,lv_i,addnum
FOR lv_i=0 TO 49
iflsflag=0
FLASH_READDBL lv_i,iflsflag
IF iflsflag=70214733 THEN
FLASH_READ2DBL lv_i,1,gs_SysParam(lv_i)
addnum=addnum+1
ENDIF
NEXT
?"上传完成,上传配置文件数:"addnum
ENDSUB
4.删除配置文件
GLOBAL SUB DeleCurParam()
LOCAL lv_i
FOR lv_i=0 to gv_SysMaxAxis-1
'初始化轴参数变量
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).No=lv_i
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisAtype=0 '轴类型
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).OnePulses=8388608 '轴电机一圈脉冲数
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisPitch=20 '轴螺距
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisSpeed=100 '轴的运动速度
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisAccel=1000 '轴的加速度
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisDecel=1000 '轴的减速度
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisSramp=0 '轴的S曲线时间
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisLspeed=0 '轴的起始速度
'初始化回零参数变量
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).DatumMode=104 '轴的回零模式
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).BackZeroSpeed=50 '轴的回零速度
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisCreep=2 '轴的回零第2段速度
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).DatumIn=-1 '轴的回零信号
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).FwdIn=-1 '轴的正向硬限位信号
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).RevIn=-1 '轴的负向硬限位信号
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).FsLimit=1000 '轴正限位
gs_SysParam(gv_CurParamNum).SysAxis(lv_i).RsLimit=-1000 '轴负限位
'初始化参数文件
gs_SysParam(gv_CurParamNum).FileName="NONE" '初始化参数文件名
NEXT
LOCAL iflsflag
iflsflag=0
FLASH_WRITEDBL gv_CurParamNum,iflsflag,gs_SysParam(gv_CurParamNum)
?"删除成功"
ENDSUB
编辑:黄飞
全站搜索