
现以相同的机械条件,比较位置与速度两种控制模式,伺服电机运行速度的稳定性。
机械传动方式为同步带方式;
伺服电机为R88M-G型伺服电机;
驱动器为R88D-GT型驱动器;
上位机控制器为CP1H-XA型plc。
一、 位置控制模式
1、 位置控制时的控制接线方式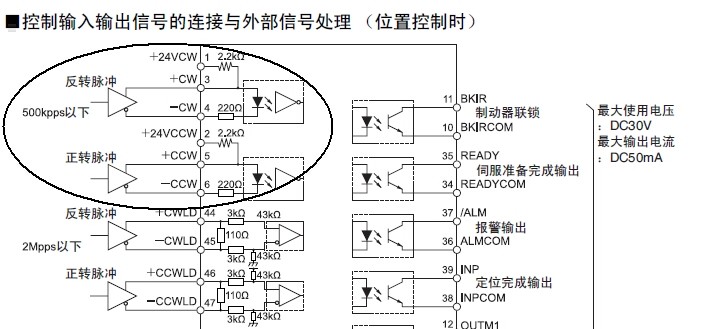
2、 必要的参数设定:Pn02(控制模式选择) 设定为0。
位置控制时主要是通过上位机PLC中的SPED指令设定伺服电机的运行频率。
3、 位置控制时,用CX-Drive软件监视伺服电机的速度曲线。如下图:
二、 速度控制模式
1、 速度控制时的控制接线方式
2、 必要的参数设定:Pn02(控制模式选择) 设定为1。
通过外接0―10V DC信号,由电位器输入到PLC的A/D中,然后由PLC的D/A输出来控制伺服电机运行。
3、 速度控制时,用CX-Drive软件监视伺服电机的速度曲线。如下图: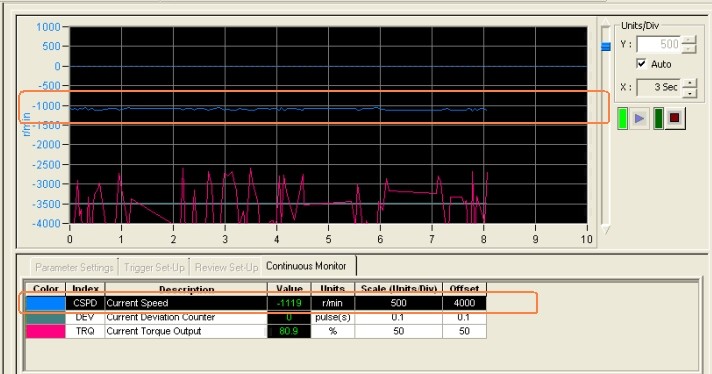
三、 总结
根据上述的速度曲线图中的比较,说明位置控制模式下的速度控制比速度模式下的速度控制要稳定。经长时间的生产运行,位置模式控制的速度一直都很稳定,满足的用户的要求。
全站搜索