(3) 当0<
ξ<1时,系统为欠阻尼系统。此时,系统在过渡过程中处于减幅振荡状态,其幅值衰减的快慢,取决于衰减系数
ξωn。在
ωn确定以后,
ξ愈小,其振荡愈剧烈,过渡过程越长。相反,
ξ越大,则振荡越小,过渡过程越平稳,系统稳定性越好,但响应时间较长,系统灵敏度降低。
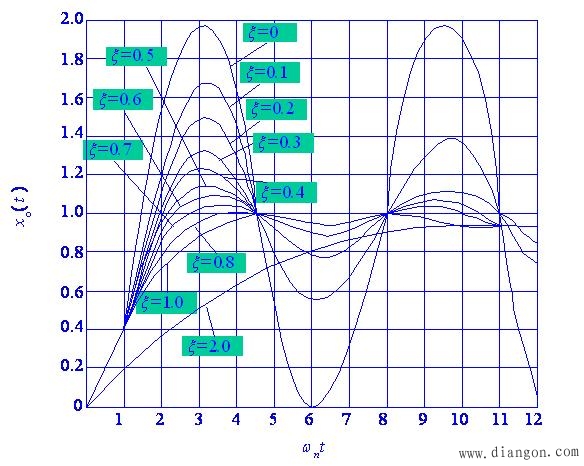
图2-13 二阶系统单位阶跃响应曲线
在图2-15所示的机械系统中,设系统的弹簧刚度为
K。如果系统开始处于静止状态,当输入轴以一定的角速度转动时,由于静摩擦力矩T的作用,在
θ
i≤ 范围内,输出轴将不会运动,
θ
i值即为静摩擦引起的传动死区。在传动死区内,系统将在一段时间内对输入信号无响应,从而造成误差。
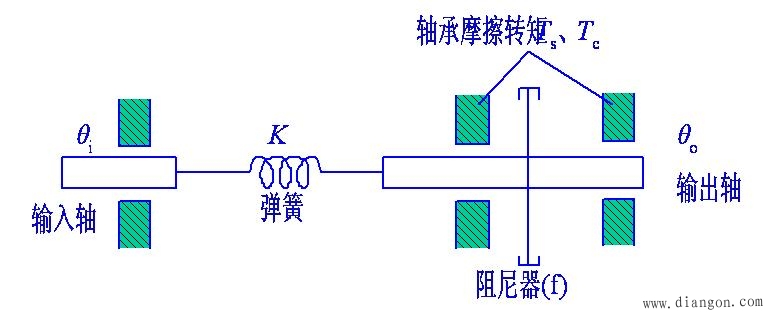
图 2-15 力传递与弹性变形示意图





