
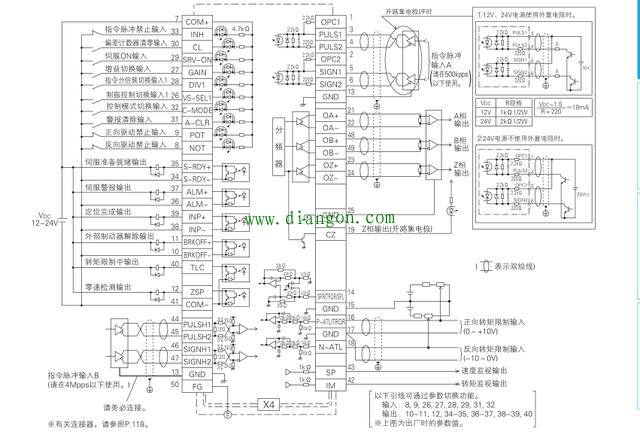
位置控制接线图
根据接线图我们可以看出,伺服的功能强大,拥有很多引脚,很多功能。但是我们可以根据自己的需求,只接其中的部分引脚即可。(其中7号引脚需接12~24v,41号引脚和29号引脚短接到0v,必须要接的)然后如果我们用plc对伺服进行控制,若是我们接的3,4,5,6号引脚,则我们需要将3号和5号引脚短接到24v,4号和6号引脚串接2KΩ的电阻后分别接到PLC的脉冲输出和方向输出端子上。如果我们用的是1,4,2,6号引脚,则我们不需要串电阻即可。那么接好线后,我们需要更改伺服的哪些参数呢?
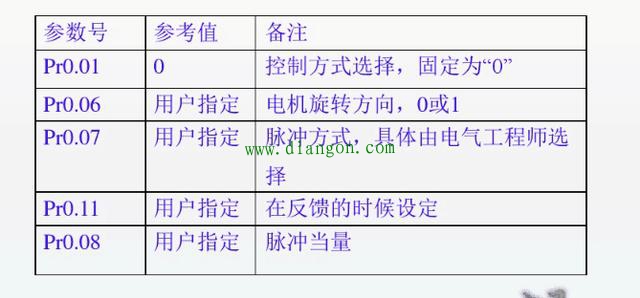
位置控制参数调节
参数的设置,小伙伴们可以参考一下伺服的综合手册。
2:速度控制模式,此模式使用较少,此种模式,伺服控制器的功能相当于一个变频器,能够用模拟量对伺服的运行速度进行控制,其硬件接线图如下图所示:
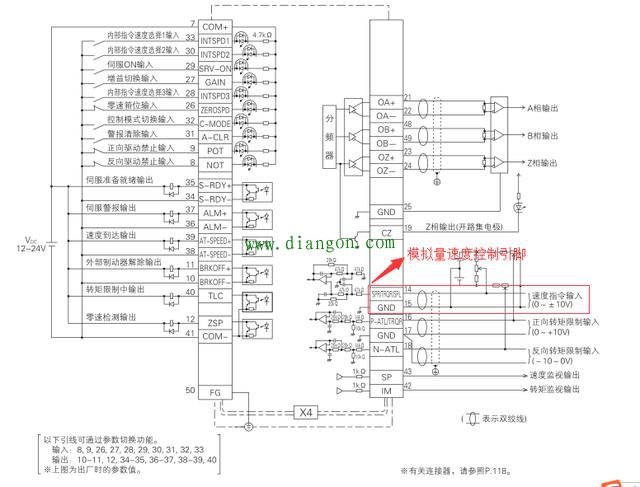
速度控制接线图
此种控制模式下,(其中7号引脚需接12~24v,41号引脚和29号引脚短接到0v,必须要接的),我们可以将0~10v的电压接到14以及15号引脚上,设置好相关参数之后,我们就可以通过改变0~10v的电压来控制电机的运行速度,其中有一点要注意,我们可以将电压变为0v用来停止电机的运行,但是通常情况下,模拟量不会完全为0,因此我们可以控制26号引脚,通过接通26号引脚,将伺服停止。想要使用此功能,需要对Pr315设置,将其值改为1后,保存到驱动器中即可。

速度控制模式参数设置
其中这些参数如何设置,需要根据小伙伴们的具体使用情况去设置,小伙伴可以参考一下使用手册哦。上面有更详细的参数说明呢。
3:力矩控制模式,因为小编有专门的文章介绍力矩的使用方法,在这里,小编就简单的上一个接线图和伺服调试参数图供小伙伴参考吧,具体的使用可以看小编的力矩使用篇哦。

力矩控制接线图

力矩控制模式参数设置
全站搜索